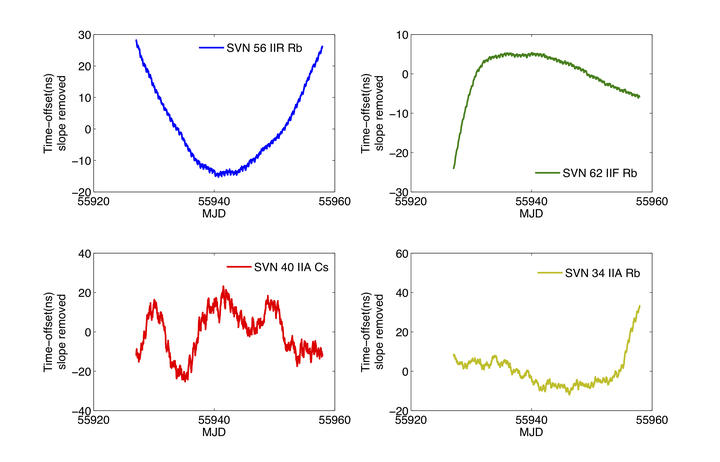
 Time plots of time offsets (detrended) of four different types of GPS satellite clock from GPS Time.
Time plots of time offsets (detrended) of four different types of GPS satellite clock from GPS Time.
Abstract
In an operational sense, satellite clock time offset prediction (SCTOP) is a fundamental requirement in global navigation satellite systems (GNSS) technology. SCTOP uncertainty is a significant component of the uncertainty budget of the basic GNSS pseudorange measurements used in standard (i.e not high-precision), single-receiver applications. In real-time, this prediction uncertainty contributes directly to GNSS-based positioning, navigation and timing (PNT) uncertainty. In short, GNSS performance in intrinsically linked to satellite clock predictability. Now, satellite clock predictability is affected by two factors: (i) the clock itself (i.e. the oscillator, the frequency standard etc.) and (ii) the prediction algorithm. This research focuses on aspects of the latter. Using satellite clock data—spanning across several years, corresponding to multiple systems (GPS and GLONASS) and derived from real measurements—this thesis first presents the results of a detailed study into the characteristics of GNSS satellite clocks. This leads onto the development of strategies for modelling and estimating the time-offset of those clocks from system time better, with the final aim of predicting those offsets better. The satellite clock prediction scheme of the International GNSS Service (IGS) is analysed, and the results of this prediction scheme are used to evaluate the performance of new methods developed herein. The research presented in this thesis makes a contribution to knowledge in each of the areas of characterisation, modelling and prediction of GNSS satellite clocks. Regarding characterisation of GNSS satellite clocks, the space-borne clocks of GPS and GLONASS are studied. In terms of frequency stability (and thus predictability) it is generally the case that the GPS clocks out-perform GLONASS clocks at prediction lengths ranging from several minutes up to one day ahead. There are three features in the GPS clocks—linear frequency drift, periodic signals and complex underlying noise processes—that are not observable in the GLONASS clocks. The standard clock model does not capture these features. This study shows that better prediction accuracy can be obtained by an extension to the standard clock model. The results of the characterisation and modelling study are combined in a Kalman filter framework, set up to output satellite clock predictions at a range of prediction intervals. In this part of the study, only GPS satellite clocks are considered. In most, but not all cases, the developed prediction method outperforms the IGS prediction scheme, by between 10% to 30%. The magnitude of the improvement is mainly dependent upon clock type.